LoG边缘检测算子
LoG边缘检测算子是David Courtnay Marr和Ellen Hildreth(1980)共同提出的。因此,也称为边缘检测算法或Marr & Hildreth算子。该算法首先对图像做高斯滤波,然后再求其拉普拉斯(Laplacian)二阶导数。即图像与 Laplacian of the Gaussian function 进行滤波运算。最后,通过检测滤波结果的零交叉(Zero crossings)可以获得图像或物体的边缘。因而,也被业界简称为Laplacian-of-Gaussian (LoG)算子。
算法描述:LoG算子也就是 Laplace of Gaussian function(高斯拉普拉斯函数)。常用于数字图像的边缘提取和二值化。LoG 算子源于D.Marr计算视觉理论中提出的边缘提取思想, 即首先对原始图像进行最佳平滑处理, 最大程度地抑制噪声, 再对平滑后的图像求取边缘。 由于噪声点(灰度与周围点相差很大的像素点)对边缘检测有一定的影响,所以效果更好的边缘检测器是LoG算子,也就是Laplacian-Gauss算子。它把的Gauss平滑滤波器和Laplacian锐化滤波器结合了起来,先平滑掉噪声,再进行边缘检测,所以效果会更好。
高斯函数和一级、二阶导数如下图所示:
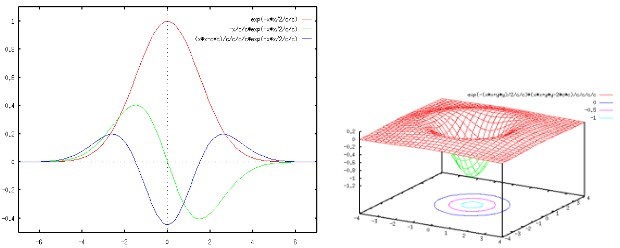
LoG算子到中心的距离与位置加权系数的关系曲线象墨西哥草帽的剖面,所以LoG算子也叫墨西哥草帽滤波器。
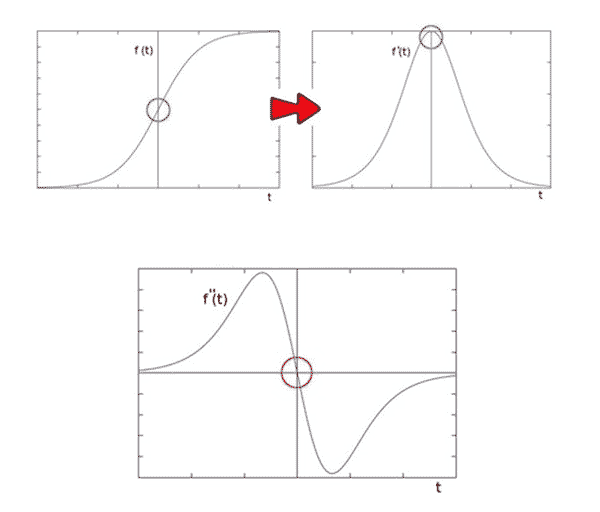
拉普拉斯算子是二阶差分算子,为什么要加入二阶的算子呢?试想一下,如果图像中有噪声,噪声在一阶导数处也会取得极大值从而被当作边缘。然而求解这个极大值也不方便,采用二阶导数后,极大值点就为0了,因此值为0的地方就是边界。
如下图所示,上面是一阶导数,下面是二阶导数:
一、基于LoG算子的图像边缘检测
原图:

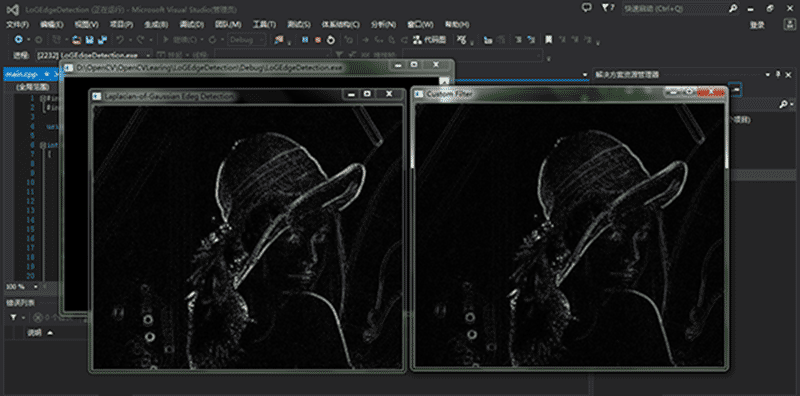
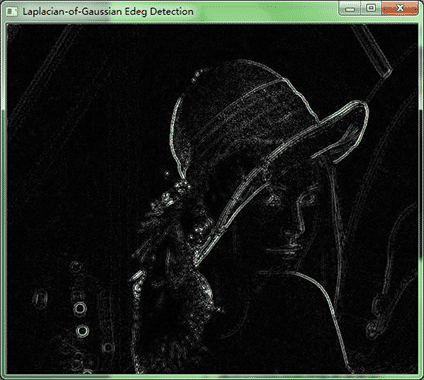
1.LoG算子与自定义滤波算子进行比较的结果:
2.LoG算子的结果:log-result
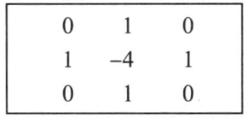
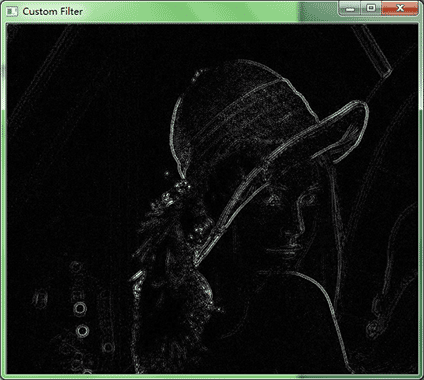
3.自定义3*3
| 1 | 1 | 1 |
|---|---|---|
| 1 | -8 | 1 |
| 1 | 1 | 1 |
滤波结果:
二、代码解析
下面是一段基于LoG算子的图像边缘检测的代码,同时会生成两个结果,一个是LoG算子的结果,第二个是自定义3*3大小的一个算子的滤波结果(可以修改对应代码实现你自己想要的算子)
-
IDE:Visual Studio 2013
-
语言:C++
-
依赖:OpenCV 2.4.9
程序是在VS2013和OpenCV2.4.9下运行的,部分参考代码如下,相应位置有详细注释,整个工程文件见下载页面:
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
using namespace cv;
int main()
{
//使用LoG算子做边缘检测
Mat src, src_gray;
int kernel_size = 3;
const char* window_name = "Laplacian-of-Gaussian Edeg Detection";
src = imread("Lenna.jpg");
GaussianBlur(src, src, Size(3, 3), 0, 0, BORDER_DEFAULT); //先通过高斯模糊去噪声
cvtColor(src, src_gray, CV_RGB2GRAY);
namedWindow(window_name, CV_WINDOW_AUTOSIZE);
Mat dst, abs_dst;
Laplacian(src_gray, dst, CV_16S, kernel_size); //通过拉普拉斯算子做边缘检测
convertScaleAbs(dst, abs_dst);
imshow(window_name, abs_dst);
//使用自定义滤波做边缘检测
//自定义滤波算子 1 1 1
// 1 -8 1
// 1 1 1
Mat custom_src, custom_gray, Kernel;
custom_src = imread("Lenna.jpg");
GaussianBlur(custom_src, custom_src, Size(3, 3), 0, 0, BORDER_DEFAULT); //先通过高斯模糊去噪声
cvtColor(custom_src, custom_gray, CV_RGB2GRAY);
namedWindow("Custom Filter", CV_WINDOW_AUTOSIZE);
Kernel = (Mat_<double>(3, 3) << 1, 1, 1, 1, -8, 1, 1, 1, 1); //自定义滤波算子做边缘检测
Mat custdst, abs_custdst;
filter2D(custom_gray, custdst, CV_16S, Kernel, Point(-1, -1));
convertScaleAbs(custdst, abs_custdst);
imshow("Custom Filter", abs_custdst);
waitKey(0);
return 0;
}
从实验比较结果来看,OpenCV自带的LoG算子的图像边缘检测和自定义的算子的肉眼观测结果差距不大,大家可以自己试试改一改自定义算子来观察实验结果~
基于LoG算子的图像边缘检测,整个工程文件见下载页面